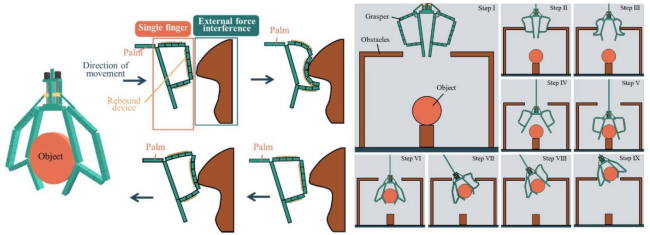
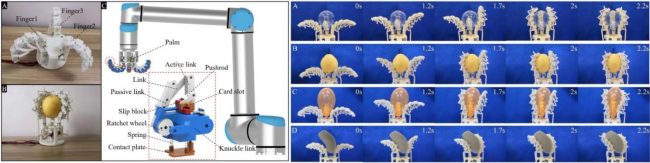
Recently, Professor Wang Rugui and his research team from the School of Mechanical Engineering (GXU) have developed a highly adaptable design for a flexible robotic grasper based on the principle of thick panel origami. This innovative design effectively combines the stable grasping capability of rigid component graspers with the anti-interference ability of flexible component graspers, providing a novel approach for stable object manipulation in complex interactive environments.
The research paper, titled “Design of Thick Panels Origami-inspired Flexible Grasper with Anti-interference Ability” has been published in the renowned journal Mechanism and Machine Theory, which is a TOP-tier journal in the “Q1” category of the Journal Citation Reports. Moreover, This journal is affiliated with the International Federation for the Promotion of Mechanism and Machine Science (IFToMM). The research was exclusively conducted at GXU, with Professor Wang Rugui as the first author and corresponding author. The grasper configuration devised by the research team underwent meticulous evaluation by experts and editors from Mechanism and Machine Theory and has been officially designated as “GXU-F-Grasper” (abbreviated for Guangxi University Flexible Grasper).
GXU-F-Grasper
GXU- Grasper
In the context of China’s “14th Five-Year Plan for the Development of the Robotics Industry” (The Joint Regulation of the Ministry of Industry and Information Technology (MIIT) is a collaborative document jointly issued by 15 departments, including the MIIT, the National Development and Reform Commission, and the Ministry of Science and Technology), robotic graspers, serving as crucial end effectors in robots, are identified as a significant research focus. In recent years, Professor Wang Rugui has led the Advaned Mechanisms and Roboticized Equipment Research Team, dedicating their efforts to the design and performance analysis of robot end effectors. Their commendable work has been published in renowned domestic and international journals, including Journal of Mechanical Engineering, Mechanism and Machine Theory, Journal of Mechanisms and Robotics - Transactions of the ASME, and Journal of Mechanical Design - Transactions of the ASME, producing a series of high-quality academic papers.
Notably, the research achievements of Professor Wang Rugui’s team have been named after GXU in the field of mechanical engineering. In January 2023, an academic paper titled “Self-Adaptive Grasping Analysis of a Simulated 'Soft' Mechanical Grasper Capable of Self-Locking” was published in the journal of the American Society of Mechanical Engineers (ASME). The innovative grasper design, emulating a “soft” yet adaptive rigid gripper, was aptly named “GXU Grasper” by the distinguished journal.
Furthermore, it is worth acknowledging that historically, representative grasper design schemes in the domain of robotics have often been denoted with names inspired by individuals or institutions, such as Stanford Grasper, Utah/MIT Grasper, DLR/HIT Grasper, and others.
 Address: No.100,East Daxue Road,Xixiangtang District,Nanning, Guangxi,China
Address: No.100,East Daxue Road,Xixiangtang District,Nanning, Guangxi,China Postal Code: 530004
Postal Code: 530004 Tel: 86-771-3238863
Tel: 86-771-3238863 Email: gjc@gxu.edu.cn
Email: gjc@gxu.edu.cn